ARLINGTON, Va., March 11 -- A balloon-shaped robot explorer that could one day search for water on other planets has survived some of the most trying conditions on Earth on a 70-kilometer (40-mile), wind-driven trek across Antarctica.
The Tumbleweed rover, which is being developed at NASA's Jet Propulsion Laboratory (JPL) in Pasadena, Calif., left the National Science Foundation's Amundsen-Scott South Pole Station on Jan. 24, completing its roll across Antarctica's polar plateau roughly eight days later. Along the way, the beach-ball-shaped device, roughly two meters (six feet) in diameter, used the global Iridium satellite network to send information about its position, the surrounding air temperature, pressure, humidity and light intensity to a JPL ground station.
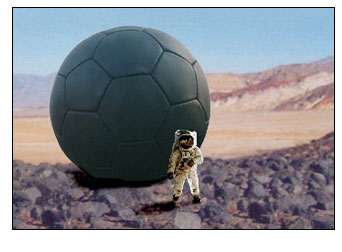
Celestial Soccer? An artist's rendition of the Tumbleweed rover on Mars. The large, beachball-like device holds a central payload by means of a series of tension cords. On Mars, a 6-meter diameter ball could be used for descent (replacing the parachute), landing (replacing the airbag) and mobility (wind-driven on surface). With a 6-meter diameter ball on Mars, speeds of about 10 m/sec could be achieved during typical afternoon winds of 20 m/sec; steep hills should be easily climbed with only moderate winds. To stop, the ball is partially deflated by remote control; its mobility is then returned by command using a built-in pump to reinflate it.
The test was designed to confirm the rover's long-term durability in an extremely cold environment, with an eye toward eventually using the devices to explore the Martian polar caps and other planets in the solar system. It reinforces the findings of a test conducted previously on the Greenland ice cap, also carried out under the auspices of NSF's Office of Polar Programs (OPP). OPP manages the US Antarctic Program, arranging logistical support and infrastructure for NSF-supported scientists as well as other government agencies, such as NASA, when they conduct science in Antarctica.
The final Tumbleweed rover is envisioned as a lightweight, roughly 40-kilogram (88-pound) device that can serve multiple roles as an independent robotic explorer. The rover's design allows it to act as a parachute while descending through an atmosphere, an air bag on landing, and, ultimately, as an unmanned vehicle equipped with an package of scientific instruments.
Tumbleweed is the brainchild of several JPL scientists, including Alberto Behar, a researcher with JPL's robotic vehicles group. During a three-day deployment at the South Pole, Behar unpacked, assembled, inflated, tested and deployed the rover. He says that the efficiency of the deployment is testament to Tumbleweed's cost-effectiveness and ease of use.
Even though the average external temperature during the rover's deployment approached minus 30 degrees Celsius (minus 22 degrees Fahrenheit), the rover kept its internal instrument payload at an average temperature of roughly 30 degrees Celsius (86 degrees Fahrenheit) using excess heat from the instrument electronics circulated by an air pump. The ultradurable ball reached speeds of 30 kilometers per hour (18.6 miles per hour) over the Antarctic ice cap and traveled at an average speed of about six kilometers per hour (3.7 mph).
The winds at the South Pole were unusually low during the test. As a result, the rover did not move at all for several periods during its deployment. But, even taking those lulls into account, Tumbleweed managed an average speed of 1.3 kilometers per hour (0.8 mph) over the course of the deployment. Such speeds are unattainable in conventional, mechanical rovers-such as Spirit and Opportunity, currently operating on the surface of Mars -- which average little more than 0.05 kilometers per hour (0.03 mph) on flat, dry ground.
Behar said the rover's design is especially well suited for polar missions that use instrument packages to look for water beneath the surface of an ice sheet, a task that cannot be done accurately from orbit.
Plans to construct the next generation Tumbleweed rover are already underway at JPL. Design refinements are likely to focus on reducing the rover's weight and rolling resistance to lower the minimum winds needed to propel the rover and enable it to travel farther, and adapting the payload to include a ground-penetrating radar or magnetometer to conduct ice surveys.
Behar said he hopes an updated version of Tumbleweed will be deployed again in late 2004 or early 2005, and that the Tumbleweed design may one day find itself rolling over the polar icecaps of Mars.
For more information, visit: www.nsf.gov