Cameras gain stereo 3-D vision based on human brain function.
Thomas D. Grevel, 3D Image Processing GmbH
In today’s world, with its increasing demand for security, passive optical sensors are helping to keep us safe. They typically are used in video cameras that generate a two-dimensional image on a screen. The problem with 2-D imaging for security purposes is that the automated process to analyze the images often leads to false alarms because of the information that is missing from the third dimension, which can amount to as much as 50 percent or more that is needed to classify an object.
A three-dimensional technology is under development by 3D Image Processing GmbH of Munich, Germany, that offers a way to perform real-time distance measurement. It uses two “stereo cameras” and an algorithm to put the images together. In a 3-D image, a person can be differentiated from a photograph of him/herself, offering a huge advantage over 2-D technology, which, in the past, has granted access to secured areas to anyone holding a photograph in front of a 2-D camera.
Two-dimensional imaging has many drawbacks in surveillance and security applications. For example, if a 2-D camera looks down on a group of people, it cannot detect the relative height and, therefore, cannot distinguish between an adult and a child without using other features for classification. With three dimensions, the height information is available, and the object can be classified more accurately.
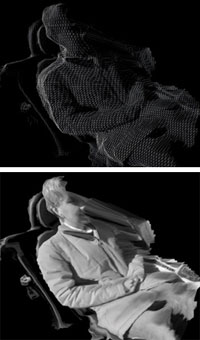
The wire frame model (top) is a standard method of visualizing 3-D images. It was created using a stereo camera and the Realtime-3D Vision algorithm. Another method (bottom) is texture mapping, which is created when the original image is placed over a 3-D object, such as a wire frame net.
The 3-D technique under development is based on the processing functions performed in the human brain when it constructs a 3-D view from the retinal images from the eyes. The technology is replacing classical computer vision algorithms with software that is similar to the human vision system. Using two logarithmic imagers (120 dB), up to 400 2-D images can be delivered under various light conditions in a stereo camera. The images are processed with 3D Image Processing’s patented Realtime-3D Vision stereo algorithm into the same number of 3-D images.
The way the “eyes” work is by the stereo camera reconstructing the shape and size of the objects in real time. The captured images are sent from the stereo camera to a computer that has a logic module installed, which reproduces the operations of the corresponding vision function of the neuronal network.
Myriad uses
This 3-D technology can be used to detect camouflaged objects, and the volume or distance of an object can be measured. With the cameras mounted horizontally, the system can generate a top view that allows the tracking of any number of individual people, even in a crowded place such as an airport. It also can be used to automatically detect objects such as abandoned pieces of luggage that are in one spot longer than a specified period.
The potential uses for this stereo-imaging technology include military and security applications; for example, “people counting” in public transportation systems. It can also be installed in autonomous robots operating in hostile environments. Robots very often need to see and analyze their surroundings, and doing so in three dimensions enables them to better understand their surroundings and move more efficiently.
The next challenge is to image transparent objects. This is a nearly impossible task for traditional computer-vision-based algorithms and software, but one that 3D Image Processing will be working on in the coming year.
Meet the author
Thomas D. Grevel is managing director of 3D Image Processing GmbH; e-mail: [email protected].