The combination of spectrometry and imagery yields higher-dimensional data that enable standoff chemical detection.
Jeff Legault, Telops USA Inc., and Dr. Martin Chamberland and
Dr. André Villemaire, Telops Inc.
Interest in the detection, identification and quantification of chemicals in the gaseous state from a safe distance has increased in the context of domestic defense applications. One promising method to achieve such standoff detection and quantification involves imaging spectroradiometry in the thermal infrared region.
This passive method of chemical analysis relies on the imbalance of emission and absorption of chemical species in the field of view of the instrument. If the gas is warmer than the temperature of the background, the spectral bands of the molecules in the gas appear in the emission data, and the same bands are seen in the absorption data when the gas is colder.
Such hyperspectral techniques combine two technologies: spectrometry and imagery, each of which has well-established applications in numerous fields. The term “hyperspectral” has become a buzzword to describe this advanced field of remote sensing.
Spectrometers are widely used for chemical analysis in industrial, environmental and defense applications. The spectral measurement of the transmitted, emitted or reflected radiation in the infrared region of the electromagnetic spectrum reveals signatures due to the vibrational transitions that are unique to each molecule. Similar chemical specificity can be obtained in the near-infrared, visible and UV regions using electronic transitions, including absorption, fluorescence and luminescence phenomena, but an advantage of using the thermal infrared (3 to 12 μm) is that room-temperature objects emit radiation in this range, so measurement does not require any source of excitation. This technique, therefore, is known as passive detection.
Imagers reveal information on a more macroscopic level about how matter is assembled around us. Perhaps the most widespread use of imagery is found in CCD and CMOS industrial inspection, where products are checked for size, shape, orientation or texture. In the long-wave infrared range, imagery often takes the form of thermography, where not only the contour of an object can be seen, but also the location where the calibrated infrared radiance is converted in temperature maps. This information lends itself to verification of thermal systems, such as furnace inspection or the search for home insulation defects.
Hyperspectral data
The product of a hyperspectral sensor often is called a “datacube.” A datacube is a three-dimensional representation of a physical observable, such as spectral radiance (units of watts per steradian per square meter per micron), as a function of two spatial dimensions and the spectral dimension (Figure 1). Such an entity can be difficult to understand intuitively because human perception essentially is visual and thus limited to two dimensions.
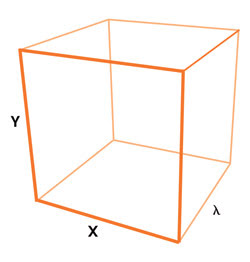
Figure 1. A datacube is a three-dimensional representation of a physical observable as a function of two spatial (X and Y) and one spectral dimension (λ).
To make matters worse, most hyperspectral data are in fact four-dimensional objects, because it is usually desirable to observe the evolution of the measured phenomenon over time. The generic representations of four-dimensional objects are called tesseracts (see “Understanding the Dimensionality of Data” below). Human analysis of such hyperspectral data requires that they be projected onto a 1- or 2-D space.
An example of a hyperspectral data viewer is shown in Figure 2. In this case, two projections — a map and a spectrum — of the tesseract are available. Tools optimized for speed, such as the viewer, are necessary to quickly explore the data, which tend to be acquired in very large quantities by modern sensors.
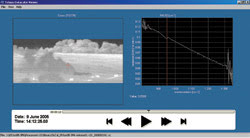
Figure 2. Hyperspectral data are higher-dimensional objects that must be projected into 1- or 2-D space – in this case, a map and a spectrum — for a human observer to analyze.
Hyperspectral sensors
There are numerous methods for constructing a hyperspectral sensor. Given the high dimensionality and volume of the data to be acquired, most sensors use detector arrays that provide several simultaneous measurements.
A common construction technique is to use a dispersive element such as a grating or a prism and to re-image the spectrometer entrance slit onto a two-dimensional photodetector array; for example, a CCD. This instrument can capture instantaneously one spatial line of the field of view: that admitted by the slit.
To get the full field of view of a 2-D scene, the instrument must scan across the scene. In the case of air- or spaceborne instruments, the motion of the platform often can provide this scanning. For fixed-site operation, such as in a tripod- or mast-mounted instrument, a scanning mechanism must be incorporated to build the second spatial dimension. Furthermore, scanning usually must be repeated to provide the fourth dimension — the temporal one.
A somewhat easier way to construct a hyperspectral imager is to use a conventional imaging configuration and to add spectral modulation in the optical path. Numerous nonmultiplexed spectral modulation methods have been used in which the bands of interest are admitted sequentially via multiple fixed-bandpass filters mounted on a filter wheel or via tunable bandpass filters (i.e., a Fabry-Perot element).
Multiplexed spectral methods can offer advantages in sensitivity when scene-independent noise components are present, such as readout noise from a focal plane array. These methods include the use of Michelson-type interferometers, also known as Fourier transform spectrometers. In such an instrument, the scene light is split into two beams, whose optical paths are varied differentially and recombined to allow interference. This type of spectrometer also has the advantage of offering high spectral resolution while maintaining a large light-throughput capability, another criterion for sensitive measurements.
It is difficult to compare all hyperspectral imagers because sensor characteristics should be evaluated based on the specific requirements for a given application.
Passive standoff detection
The detection of gaseous chemical species in the 8- to 12-μm atmospheric window requires a spectral resolution of approximately 16 to 32 cm–1. However, the discrimination of approximately 100 gases in this spectral range requires a higher spectral resolution — on the order of 2 to 4 cm–1. This is necessary to separate the sometimes small shifts or intensity variations in the spectral signatures of these gases. The other important requirement for the detection of gaseous emissions is the overall sensitivity of the instrument, because the air-to-background temperature contrasts in natural scenes typically are around 0.5 to 2 K.
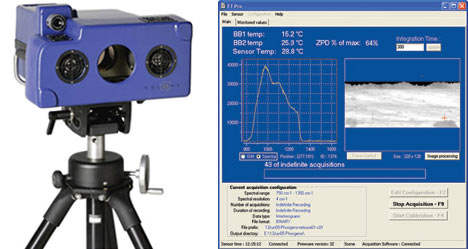
Figure 3. The First hyperspectral imaging instrument (above) and acquisition software (right) generate calibrated datacubes for the passive standoff detection of gases.
Compact and robust hyperspectral imagers based on Fourier transform spectrometers, such as First (field-portable imaging radiometric spectrometer technology), can offer the spectral resolution and sensitivity required for passive standoff detection of gases (Figure 3). This instrument features 320 × 256 pixels over a 6.5° × 5° field of view, a user-selectable spectral resolution of 0.25 to 150 cm–1 over the 8- to 11.8-μm spectral range, and a 0.15-K sensitivity for each pixel of the scene at 16-cm–1 spectral resolution for a 0.5-s observation time. It is housed in a 17-kg, 0.025-m3 package, making it ideal for operation in the field.
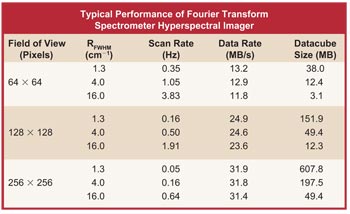 This instrument relies on the latest advances in high-speed IR focal plane arrays and on the processing power of modern signal processing electronics. The sensor can generate calibrated data (Fourier transformed and radiometrically calibrated) at a rate of 30 MB/s. Depending on the spatial extent and spectral size, each datacube in a time sequence ranges from a few to several hundred megabytes (Table 1).
This instrument relies on the latest advances in high-speed IR focal plane arrays and on the processing power of modern signal processing electronics. The sensor can generate calibrated data (Fourier transformed and radiometrically calibrated) at a rate of 30 MB/s. Depending on the spatial extent and spectral size, each datacube in a time sequence ranges from a few to several hundred megabytes (Table 1).
Data collected in the field with First provide examples of the passive standoff detection of gases. Figure 4 illustrates a measurement of a 41-s release of SF6, a chemical warfare agent simulator, in a natural outdoor setting. In the left column, a simple clutter-matched filter is applied to each pixel, producing a false-color “score” map. Clutter-matched filters for other gas species can be applied to the same tesseract to reveal the presence of other gases. On the right, SF6 plume contours are illustrated atop a brightness temperature map (gray scale), also extracted from the datacubes.

Figure 4. Selected frames from a 12-frame sequence over a 41-s release of a simulated chemical warfare agent illustrate a potential application of passive hyperspectral imaging. Video sequences are available at http://www.telops.com/FIRST/FIRST_video.html.
Wide potential
The joint exploitation of spatial and spectral information reduces false alarms, a problem that limits the use of current technologies in standoff chemical detection. Video sequences, filtered for specific chemical compounds, enable the human brain to act as a powerful analyzer/discriminator of the presence of the chemical clouds, further reducing false-positives.
The state-of-the-art performance of modern hyperspectral imagers makes it possible to “see” several types of gaseous plumes and emissions. This technology holds promise in several fields, including civil defense, plant monitoring and chemical warfare agent detection.
Meet the author
Jeff Legault is in the technical business development section of Telops USA Inc. in Fort Wayne, Ind.; e-mail: [email protected].
Martin Chamberland and André Villemaire are vice presidents of Telops Inc. in Quebec City; e-mail: [email protected] and [email protected].
Understanding the Dimensionality of Data
It can be difficult to grasp the concept of the gradation of dimensionality in the description of physical observables.
A zero-dimensional measurement is a scalar; for example, a thermometer reading. The measurement is a simple decimal number, such as the readout of a digital meter.
A 1-D measurement is a vector; for example, temperature plotted against time. In this case, quantitative assessment is possible because the physical observable can be read accurately from the Y-axis. The Y-versus-X display also reveals subtle changes in the measured amplitude. Many scientists — for example, spectroscopists who analyze intensity versus wavelength — develop a keen sense of visual analysis based on the observation of Y-versus-X plots.
 A 2-D measurement is a map; for example, a temperature image (thermograph) of an object obtained with an IR camera. In this case, gray-scale or false-color maps are often used.
A 2-D measurement is a map; for example, a temperature image (thermograph) of an object obtained with an IR camera. In this case, gray-scale or false-color maps are often used.
One difficulty with such maps is the derivation of quantitative information. Color or gray-scale legends are required to convey an intensity scale, which can be a somewhat indirect and imprecise process. Contour maps can improve the quantitative assessment, but they can become complicated to read.
A 3-D measurement is a datacube; for example, a spectral radiance cube over two spatial dimensions and one spectral dimension. A 4-D measurement is a tesseract; for example, a time sequence of datacubes.
There are no simple and full representations of the datacube and tesseract. They must be projected to a map, vector or scalar for visualization.