Scott Jordan and Stefan Vorndran, PI (Physik Instrumente) LP
Computer-controlled fiber alignment engines help process engineers achieve higher throughput in photonics packaging applications.
Fiber alignment used to be a tedious manual task, back before the telecom boom. But automated fiber aligners have changed all that.
Today, there is no shortage of production applications needing high throughput and high uptime. Fortunately, the photonics engineer’s toolbox is well stuffed with industrial-class solutions to meet all needs. The industry can look forward to enabling a new generation of applications challenges with these tools. But before we look at what is possible with today’s technologies, let’s look back at the first devices.
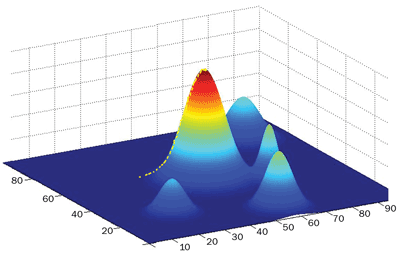
Figure 1. A digital gradient search optimizes coupling by iteratively sensing the local gradient and climbing the hill. It is one way to achieve fully automatic fiber alignment over long travel ranges.
Analog gradient search: For clean, quasi-Gaussian couplings already near optimal alignment, analog phase demodulation hill climbing is still a workable solution. However, with imperfect devices, or those that are far from optimum alignment, it will lock in on local maxima and “flat spots” that occur in multimode coupling. Despite this issue, instrumentation based on this principle was popular, although it was bulky and provided too little travel range for fully automated fiber alignment.
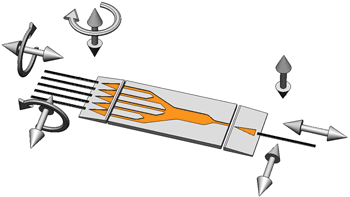
Figure 2. Waveguides are one of several classes of devices needing angular alignment.
Digital alignment algorithms: The first digital gradient search technique, introduced in the early 1990s, enabled efficient alignment of fiber optic devices with then-current motorized linear stages, which were low in resolution, speed and synchronization capabilities compared with the piezoelectric nanopositioners of today.
The advantage of this class of automatic fiber aligners was its flexibility, and the massive motorized positioners were a good match for photonics’ emerging industrial era.
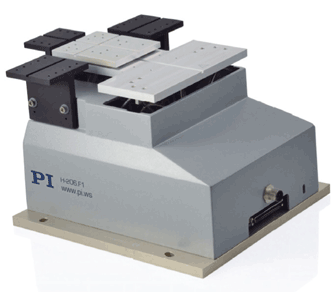
Figure 3. The F-206 HexAlign hexapod microalignment system provides six degrees of freedom of 0.1-μm-precision motion in a compact and responsive package. Fiber optic alignment animation is available at https://www.youtube.com/watch?v=vA0Zea4s9PQ.
Angular alignment: The gradient-search architectures did not cover angular alignment. Three new types of photonic devices – planar waveguides, optical switches and confocal optical trains (COTs) – brought angular alignment into the mainstream. Planar waveguides emerged as key players in switching and modulating in photonic networks. Angular alignment (especially in θZ) needed to be automated; optical switches based on collimated beam steering required throughput-optimized gimbaling alignment of collimators and other optical elements. And COTs in photonic packages had sensitive angular alignment needs.
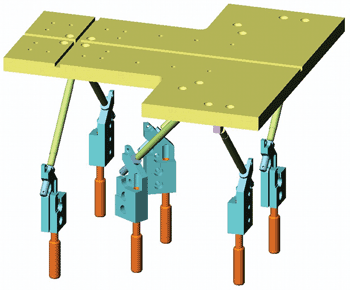
Figure 4. Motion engine of the F-206 parallel aligner. Animation is available at http://youtu.be/MEMQmtUCMeE.
These needs, along with requirements for high-throughput transverse alignment, led to the development of PI’s F-206 hexapod six-axis fiber alignment system, which combined six ultraprecision actuators with a stictionless kinematic flexure coupling design. The system comprised a fast photodetector and a flexible assortment of digital algorithms for autonomous fiber alignment automation in up to six degrees of freedom.
Significant advantages
The hexapod parallel kinematic approach allows the engineer to cast the rotational pivot point anywhere in space. Conventional stage stacks can rotate only around the fixed mechanical center points of their rotation stages and goniometers. These center points are defined by their bearings and fixturing structures, and cannot readily be moved. The hexapod enabled process engineers to place the rotation point about an optical “sweet spot” with a single software command, which makes alignment of complex fiber optic components simpler. For example, in multichannel waveguide alignments, the rotation can be about the first optical channel; in collimator-collimator alignments, the rotation can be centered on either collimator’s face. With COTs, the alignment can pivot about its focal point, which is especially useful when this is buried inside a package and is only blindly accessible by tweezers.
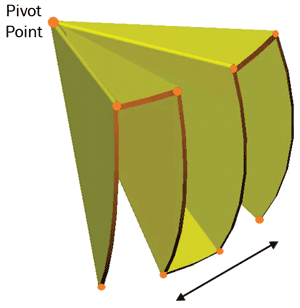
Figure 5. Angular scans around the tip of a fiber or focal point of a fiber optic device can be programmed with a few commands.
Hexapod options, fiber optic alignment power
Thanks to recent advances in hexapod design and controls, a host of robust, high-load, long-travel hexapods can be used for high-throughput industrial alignment applications. These systems build on established designs that feature high stiffness and highly triangulated geometries, so they offer travel ranges of several centimeters and also accommodate loads of many kilograms. These designs can be used in any mounting orientation and offer up to 50 percent higher acceleration than was previously possible. The new controllers – which also integrate optical metrology with the hexapods’ six degrees of freedom, plus two additional linear or rotary axes of motion – integrate data recorders to precisely correlate position and optical power. These mechanisms can produce scans of 100 × 100 μm in as little as 650 ms.
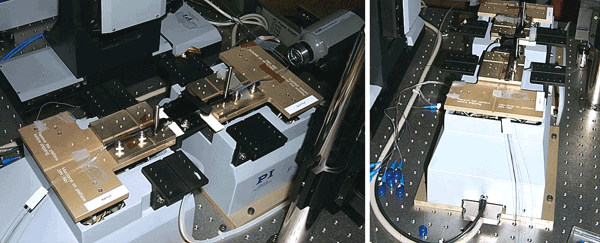
Figure 6. By integrating six degrees of freedom, F-206 facilitates complex alignments like this 10-DOF waveguide MUX/DEMUX packaging.
Interfacing options also have improved: Optional remote-control pad/displays offer hands-off manual operation. Standard TCP/IP and USB ports offer high-speed communications and compatibility with factory-automation architectures. A new software suite offers graphical user interface setup and configuration tools, as well as Windows and Linux libraries and a native, open-source LabView library.
Modular piezo fiber alignment engine
During the telecom boom of the early 2000s, a manufacturer needed to provide a particularly robust, flexible and cost-effective fiber alignment platform for coarse/fine transverse alignment. The company specified a simple stack of stages: Three motorized stages would allow many millimeters of coarse positioning for various devices the company used in production. The system would be software-based, taking advantage of fast, new analog input/output (I/O) interfaces, and would also be modular, open-source and based on LabView.

Figure 7. Advanced new hexapod options offer reduced size, longer travels, higher load capacities and faster alignment throughput for demanding industrial applications. For more information on hexapods, visit www.hexapods.net.
Challenges included irregular coupling cross sections, which can hamper gradient searches, and fiber-through-tube package designs, which complicate the search for first light. A comprehensive application coverage with time-efficient throughput was possible using a two-step sequence: first, a unique, space-efficient double-spiral scan using motorized long-travel stages for first-light capture and rough optimization, followed by an extremely fast raster scan (previously impossible without modern piezoelectric positioners and advanced controls). This was combined with synchronous data acquisition to compile the transverse coupling cross section and identify the global maximum. This approach would literally align nearly anything in a flash.
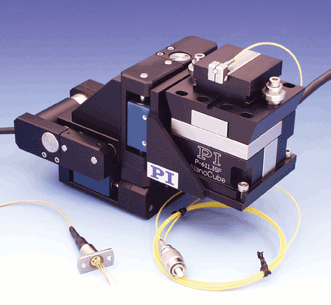
Figure 8. The CyberAligner fiber aligner coarse/fine stack provides up to 25-mm standard travel with 2-nm resolution. Modular construction means any travel range or configuration needs can be readily accommodated.
The raster-scan method is insensitive to local maxima; the global maximum can always be observed and selected. This option was unavailable a decade earlier because of the limitations of the motion devices that existed then. Piezo devices are fast, so a large amount of data can be collected to localize the global maximum directly, eliminating the need to infer the vector from limited data from older architectures.
This architecture, called CyberAligner, has recently enjoyed many advances: an upgrade to updated versions of LabView, the latest I/O capabilities offered by today’s multifunction analog/digital hardware, such as fast USB units; motion coding based on PI’s GCS (General Command Set), allowing any kind of motorized stage to be used for first-light seek and coarse alignment (cost-effective stepper motor, robust DC servomotor, stiff and stable PiezoWalk motor stages, high-speed ultrasonic motor positioners and whatever comes in the future).
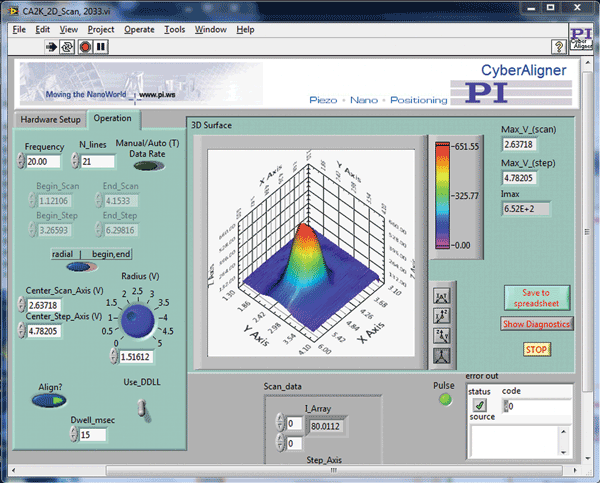
Figure 9. The CyberAligner graphical user interface, showing a device profile captured in a full-field scan in ~400 ms.
The updates further magnify the architecture’s speed advantages. The coupling cross-section data produced during the alignment scan can be saved to a local or network drive, providing access to process and device diagnostics during production. All-USB configurations are offered, cabling is simplified, and multiple workstations can be run off of one PC. Support for double-sided waveguide alignments is standard.
The best of both worlds
A new search capability was recently integrated into the system. CyberTrack is based on a patented technique for performing a digital gradient search on the fly (U.S. Patent No. 7,236,680, Aligning apparatus and method using on-the-fly determination of throughput-profile gradient for current positioning of radiated influence supplier and/or receiver). This enhances the CyberAligner double-spiral first-light search and fast raster scan: For applications with worse than 100-μm fixturing tolerances, motorized stages can perform a space- and time-efficient double-spiral scan to achieve first-light coupling. Also, a full-field (100 × 100 μm) fast raster scan is performed by PI’s NanoCube XYZ nanopositioning stage, which provides 100 µm of travel in three orthogonal axes with 2-nm resolution; the scan builds a detailed optical profile and selects the global maximum for fine alignment. The digital gradient search is then activated, quickly peaking up the coupling and tracking to accommodate any drift or disturbance.
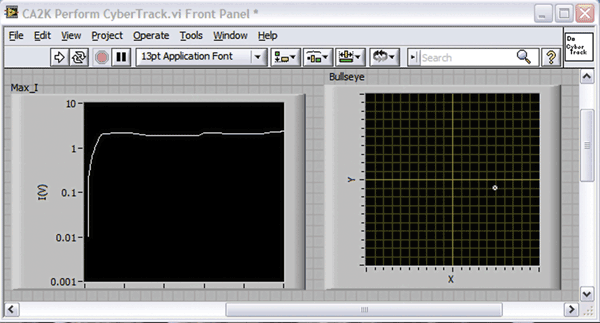
Figure 10. CyberTrack is a new capability for NanoCube and PI’s other PZT mechanisms. Based on the latest digital gradient search, it offers high-speed optimization and tracking, and is easily integrated into production applications.
Implemented in platform-independent LabView, this functionality is also readily accessed via ActiveX or MatLab. The combination of the fast raster scan and gradient search offers speed for transverse alignments.
The combined coarse/fine alignment’s performance can be compared to finding a pingpong ball in a basketball court and aligning it to better than the width of a dime in less than two seconds … and then tracking it as it rolls.
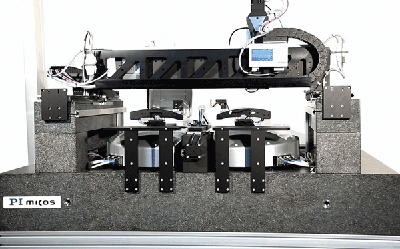
Figure 11. Preproduction bench for silicon photonics chip manufacturing and inspection. The system integrates several hardware components and software for automating assembly and alignment such as pick-and-place robotics, machine vision or precision positioning devices.
Meet the authors
Stefan Vorndran is vice president of marketing at PI (Physik Instrumente) LP; email: [email protected]. Scott Jordan is director of nanoautomation technologies for PI.