
Force/Torque Sensors Expand Robotic Capabilities
NORA BERECZKI, OPTOFORCE
The sense of touch is in high demand during automation, especially in the automotive industry, where tolerances are often very tight. As they work more closely with humans, robots need to sense their surroundings accurately and precisely and accomplish many tasks requiring the dexterity of the human hand.
Pin insertion is a standard technique in the automotive industry that demands sensitivity and submillimeter tolerances. Force/torque sensors can feel very small counterforces and make the corresponding course corrections in real time by finding the right orientation. The capability of using the sense of touch expands the options for automation and allows companies to automate monotonous, repetitive work, for which human labor is hard to find.

Force/torque sensors can feel very small counterforces down to the submillimeter level required for pin insertion and make course corrections in real time. Courtesy of OptoForce.
In 2016, industrial robot sales grew by 16 percent, according the International Federation of Robotics. Of this growth, 41 percent came from the electronics industry. The automotive industry, which posted 6 percent growth in robot sales in 2016, is still the most dominant purchasing segment of industrial robots, with a 31 percent share.
By 2019, about 2.6 million robots will be operating in factories around the world — 1 million more robots than in 2015. Market growth is being facilitated by a variety of forces: fast-developing manufacturing technology, industrial robot manufacturing innovation and its adaptation to the manufacturing process, the need for mass customization, increased population, and state initiatives to adapt industrial automation in many industries.
In addition to large companies, more and more small and medium-size enterprises are turning to industrial automation. These companies are now able to meet the demand for mass personalization, which requires a flexible manufacturing environment. By 2020 in China, for example, the number of collaborative robots in small and medium-size businesses will increase to four times that of 2016, reaching 12,000 units.
The Industrial Revolution 4.0 is about digitalizing production and the importance of collecting, storing and processing data in a digital environment. The Industrial Revolution 5.0 highlights the importance of human touch, focusing on effective cooperation between human and robot. Robots are great in performing repetitive, monotonous tasks and standardized manufacturing processes, but people are better in cognitive excellence and tasks that require skillfulness or imagination.
Robots are now more collaborative. This means they are safe, easier to deploy and affordable. We can literally place them right on a production floor without having to manipulate an existing layout because they are not as big and rigid as they were in the past.
Cobots, or collaborative robots, are designed to work with humans as guides or assistants in specific tasks. Compared to industrial robots, they are more cost-effective and lighter, which means they can be easily moved. Cobots also often have a graphical user interface that can be easily programmed without any need for programming skills. They can be set up in just a few hours (or minutes), which is important during mass personalization.
More and more classical robot makers have begun to think of solutions that make the robot more sensitive. Based on this need, increasing numbers of robot accessories will appear on the market. One such accessory is
a force sensor that can be applied to a robotic arm.
Robot-mounted force sensors can automate tasks that could not be automated before. These are mostly assembly tasks that require high precision, such as pick and place, quality control, and surface-finishing tasks such as polishing, sanding or deburring.
In these cases, robot-mounted force sensors help the robots feel very small force and torque values, just like the human hand. Six-axis force/torque sensors can measure both the force and torque along the three axes (X, Y, Z).

OptoForce’s optical six-axis force/torque sensor is capable of detecting forces as small as 0.2 N. Courtesy of OptoForce.
There are several types of force/torque sensors, including strain gauge, capacitive, or one of the latest technologies: optical. In 2012, OptoForce launched its patented optical six-axis force/torque sensor, which is capable of detecting forces as small as 0.2 N.
Optical force sensors use photodiodes to measure the amount of reflected light originally emitted by an LED. By comparing the measured values on each photodiode, the acting forces can be precisely calculated — not just their magnitude, but also their direction.
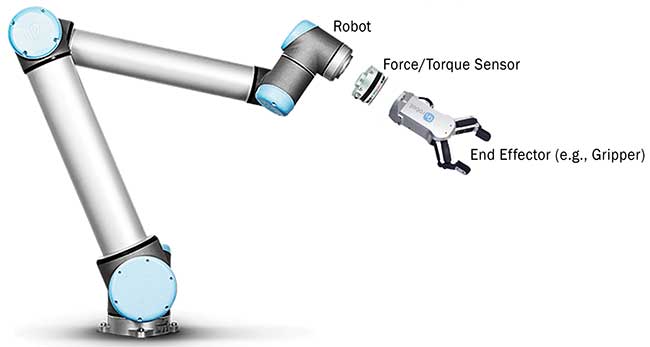
An optical force/torque sensor is mounted between the robot arm and the end of the arm tool. Courtesy of OptoForce.
Compared to strain-gauge-based load cells, optical sensors are generally much more robust, as the deforming surfaces are physically separated from the sensing element. This is achieved by using infrared light to detect the smallest deformation in the shape of the outer surface and by incorporating different types of optical-grade elastomers to achieve the most reliable results. The force/torque sensors allow the robots to perceive the human touch.
A significant differentiating feature of OptoForce’s sensor is the inclusion of a complete integrated package. Apart from the hardware, the software package developed for the force/torque sensor and robots can reduce programming time. The simple graphical user interface does not require programming skills, so complex programs can be set up in a few hours.
The development of intelligent touch and gripping technology has enormous potential. The six-axis force/torque sensors are installed between the robot arm and end effector, such as a gripper. The sensor measures any forces that impact the end-of-arm tooling. Force/torque sensors enable robots to perform force-sensitive tasks.
This technology is based on real needs. One of the most important areas is precise assembly of automobiles, where it is extremely important to sense the right force and torque values.
A car typically consists of 10,000 parts. During assembly, small measurements matter. Valve insertion into a cylinder head, for example, requires sensitive submillimeter-scale work. The human hand can quickly find the right approach simply by trying it out. Inserting pins or pegs into tight holes mechanically cannot be achieved with traditional position-based solutions. Even cameras cannot render a robust solution.
Imagine the situation when the 4.9-mm valve is inserted in a hole of 5 mm or less where the environment is very rigid. The hole also has a tilt angle, so the valve is not inserted perpendicularly, but it still requires correct orientation. Technologies are now available that can mimic the sensitivity of the human hand in order to automate this manufacturing process.
Mounting a force/torque sensor on a robot arm makes the robot more intelligent. With the help of the sensor during valve insertion, a robot will move to the direction where less force is felt. The capability of using the sense of touch expands the options for automation and allows companies to automate monotonous, repetitive work.
Meet the author
Nora Bereczki is the marketing manager at OptoForce, headquartered in Budapest, Hungary; email: [email protected].
For a video demonstration on how force/torque sensors work, visit https://optoforce.com/applications/pin-insertion.
/Buyers_Guide/Optoforce_Ltd/c31489