Lidar and optical vehicle-to-vehicle communication may be able to work together to provide solutions to autonomous vehicle challenges.
DON WILKINS, FORMER U.S. ARMY SIGNAL CORPS
Two different optical technologies — one already deployed, the other still on the drawing board — promise to ease autonomous vehicle integration. Lidar, the optical analog to radar, is deployed in Waymo and Uber vehicles and acts as the eyes, helping autonomous processors “see” the surrounding environment. Optical vehicle-to-vehicle (OV2V) communication is still in the design phase and can transmit a vehicle’s current state to other vehicles. Combining these two approaches would lessen the computational burden on an autonomous vehicle’s processors, could significantly decrease false alarms, and could improve the system’s security.
Lidar implementation
Initial lidar deployments on automobiles were large, unattractive, power-hungry systems, sensitive to vibration and subject to mechanical failure. Recent developments, however, have countered those shortcomings and offer significant improvements.
Today’s solid-state lidar, or “lidar on a chip,” ends “the heartache and the thousand natural shocks” that mechanical-based lidars were once heir to. Frequency-modulated continuous-wave (FMCW) lidar, one of several lidar technologies under development for vehicle deployment, depends upon coherent detection rather than direct sensing of reflected light (Figure 1). In addition to range information, coherent detection offers sunlight immunity and single-pulse velocity determination relative to the emitting lidar. Advanced lidars focus on portions of the outside environment, much as the human fovea does, concentrating its resources on such areas of interest as other cars and pedestrians.
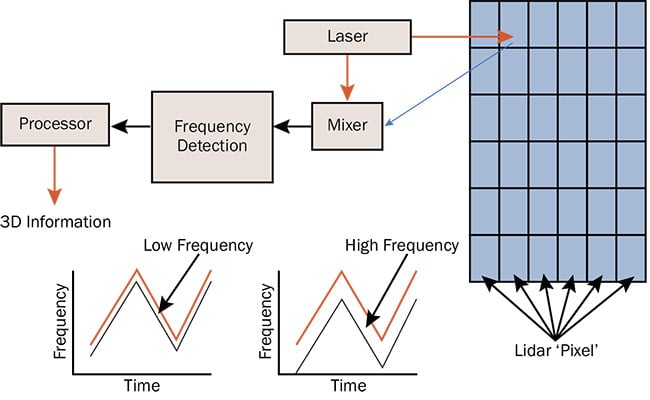
Figure 1. An FMCW lidar system. Courtesy of Don Wilkins.
The effectiveness of all lidars is related to the amount of emitted light that returns to the lidar sensor1 and can be limited by
certain factors: Curved surfaces on a target reflect light away from receivers; vehicle colors such as black absorb rather than reflect light; laser energy and frequency must be kept in eye-safe parameters; and autonomous vehicles operating at highway speeds require sensors with ranges out to 300 m. Under worst-case conditions — with black, curved surfaces or with a low-powered, eye-safe laser — the best range of any lidar is reported to be around 100 m.
OV2V implementation
OV2V communication offers its own useful contribution to safety and communication2 (Figure 2). It provides, for example, a significant improvement over the archaic and limited information provided by turn and brake indicator lights. Limited to indicating left or right turns and the application of brakes, the utility of the lights is dependent upon the operator activating them in a correct and timely manner, and upon other drivers seeing the lights in time to take appropriate corrective action. These conditions, as we know, are not certainties.
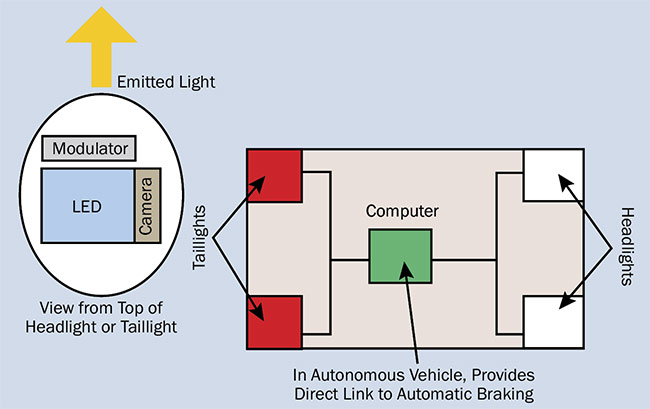
Figure 2. An OV2V architecture. Courtesy of Don Wilkins.
Replacing current incandescent lamps in turn/brake indicators with LEDs provides energy efficiencies. The LED lamps offer another possibility: modulating light to convey information about the state of the vehicle.
Head- and taillights could be modulated using IEEE 802 Part 15.7, either PHY I or PHY III. In both cases, modulation rates would be rapid enough that the
primary purposes of the headlights (illumination) and the taillights (brake warning) would be unaffected, while they
would rapidly pass large amounts of data (Figure 3). Vehicles within the line of sight (LoS) of the transmitting vehicle would receive critical information such as the position of other vehicles, their speeds, brake activation, the amount of braking applied, airbag deployment, and turn information. The information would be used to assist the driver and — in the ultimate integration — inform the autonomous vehicle by providing critical information to its processor.
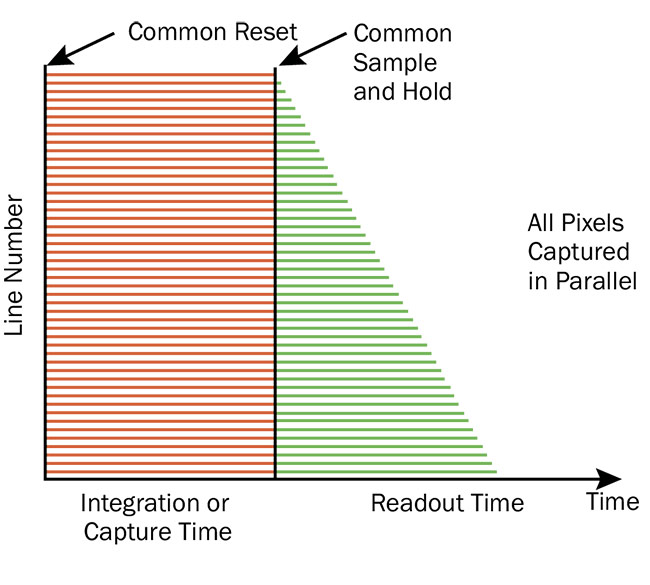
Figure 3. A global mode optical receiver used in an OV2V system. Courtesy of Don Wilkins.
Working together
By combining lidar and OV2V communication, the strengths of each cover the other’s weaknesses. Lidar detects critical information such as road edges. OV2V provides immediate identification of vehicles within and beyond the range of the lidar. Lidar would benefit from the reduction in the resources now required to read a portion of the point cloud that OV2V could identify. Processing unidentified parts of the point cloud means reduced bandwidth and computational demands on lidar, as well as decreased power consumption and size, and lower false alarm rates. Together, the two systems would be able to increase road safety and efficiency through networked detections and by interfacing with roadside infrastructure. They would also offer more reliable system security.
Networked detections
Lidar improves safety by detecting “noncooperating” objects such as pedestrians and wildlife. The OV2V network could share detections of noncooperating objects among linked vehicles, enhancing detection rates and increasing driver reaction times.
Interfacing with roadside infrastructure
OV2V would interface with roadside infrastructure, such as traffic lights equipped with cameras and processors. Information shared by lidar and OV2V would reduce delays at traffic lights while signals processed real-time traffic information. Timing could be adjusted to move high-density traffic through an intersection. Trimming wasted time would open lanes where no traffic existed. Commuting times and pollution from idling engines could be significantly reduced, and reducing delays at signals would extend the range of electrical vehicles.
Improved security
Recent literature describes how autonomous processors based on deep neural networks and sensors can be tricked into false identifications3.
By combining lidar and OV2V communication, the strengths of each cover the other's weaknesses.
An OV2V system is inherently secure against wireless hacking. LoS systems, such as OV2V, are difficult for unauthorized elements to penetrate. The would-be intruder would have to join the OV2V mobile ad hoc network (MANET) and could achieve this by physically moving in tandem with the vehicles forming the network. If the would-be intruder moved either faster or slower, they would fall out of the MANET and lose the opportunity to interfere with the network.
Optical signals are hard to jam or distort. Energy must be directed at the receiver, which has a narrow field of view. A stationary jammer, at worst, could only jam the OV2V as long as the jammer’s beam was focused on the receiver. The time period for jamming would be very small. An attacking vehicle moving within the OV2V network could transmit that it is going much faster or slower than it actually is. In the first case, the intruder risks collision; in the second, the attack, at worst, could cause the surrounding vehicles to travel slower.
Lidar provides a secondary source of vehicle position and velocity that would complicate attacks on OV2V. If OV2V reports a vehicle at a given location, operating at a particular velocity, and lidar reports different information, lidar solutions should be given priority. Attackers must simultaneously defeat both systems, which immeasurably complicates the assault.
Larger concerns
Liability issues
A legal question arises when the OV2V and lidar systems are coupled to the automatic braking system and a human driver is present. When an accident occurs, where does the ultimate responsibility lie — with the driver or the OV2V supplier? Manufacturers of autonomous vehicles shift the legal responsibility to the driver, who is supposed to maintain constant control of the vehicle. However, as has been demonstrated in numerous studies, it is impossible for a human to concentrate on or understand the workings of a completely autonomous system that requires human intervention for uncommon events.
Radio frequency V2V issues
Contention regarding a Department of Transportation radio frequency (RF) design and a 5G solution for intervehicle communication has crippled deployment of RF V2V systems. An optical solution could be rapidly retrofitted into existing vehicles and installed into new ones. The deployment of OV2V would rapidly and inexpensively bring the majority of the benefits of V2V communication to the transportation system without bureaucratic delay or expensive RF infrastructure builds that may take years to reach remote areas4.
Lidar and OV2V provide two different designs and different services to the transportation system. Once suitably integrated and providing different data, the data is transmitted to an autonomous vehicle’s processor, which could then unify the data into a common picture. This information-rich picture could reduce pollution, vehicle collisions, and commuting times, while supporting integration of fully autonomous vehicles onto the roads.
Meet the author
Don Wilkins is an electronics research engineer. He served in the U.S. Army Signal Corps and has worked in telecommunications. Wilkins has also taught electrical engineering and advanced avionics.
References
1. IEEE (Sept. 2011). IEEE standard for local and metropolitan area networks — part 15.7: short-range wireless optical communication using visible light, Std. 802.15.7-2011, https://doi.org/10.1109/IEEESTD.2011.6016195.
2. T. Neff (2018). The Laser That’s Changing the World: The Amazing Stories Behind LiDAR, from 3D Mapping to Autonomous Cars. Buffalo, N.Y.: Prometheus Books.
3. P. Zhaoqing et al. (2019). Recent progress on generative adversarial networks (GANs): a survey. IEEE Access, Vol. 7, pp. 36322-36333.
4. SAE International (June 2018). Taxonomy and definitions for terms related to driving automation systems for on-road motor
vehicles, Standard J3016_201806,
https://doi.org/10.4271/j3016_201806.