Abbe Error — Linear off-axis errors introduced by angular deviations coupled to a moment arm at the point of interest on stage mounted devices (θ in Figure 1). The effect of Abbe error will appear as linear runout δx, but unlike true linear runout, it can be minimized by reducing the moment arm. As seen in Figure 1, the relation between the angular deviation and corresponding linear error is linearly proportional to moment arm length and the sine of the deviation angle. Also known as Sine Error.
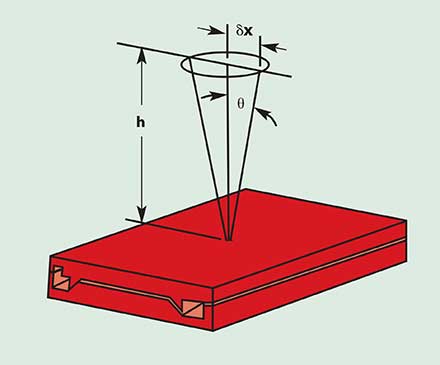
Figure 1. Relation of runout, δx, to angular deviation,θ, of a stage. The runout at a distance h is δx = θh.
Absolute Accuracy — The motion output of a system vs. the commanded or ideal input; this term may be described more intuitively as inaccuracy or error. When a motion system commanded to move 10 mm actually moves 9.99 mm compared to a measurement standard, the absolute accuracy is 0.01 mm.
Angular Runout — Angular deviations relative to perfect straight line motion will introduce positioning errors that are amplified by a moment arm to the point of interest on stage mounted devices. These angular deviations are specified as pitch, roll and yaw (Figure 2). These errors often dominate deviations from perfect straight line motion when compared to linear runout errors (straightness and flatness).
Backlash — The maximum magnitude of an input that produces no measurable output upon reversing direction. Backlash can be the result of insufficient axial preloads or poor meshing between drivetrain components, for example: gear teeth in a gearbox. Backlash is relatively repeatable and can be compensated for by capable controllers that add the backlash value during reversal. Another method to compensate for inherent backlash in a motion system is to approach targets from the same direction.
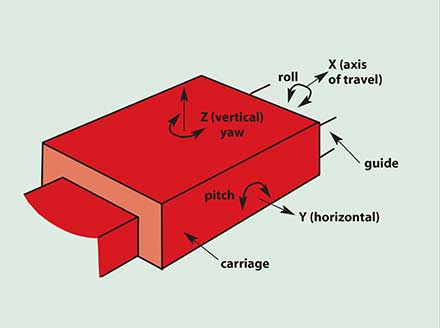
Figure 2. Angular deviation is specified in terms of roll, pitch and yaw.
Cosine Error — Misalignment between an axis of motion and a measurement axis produces cosine error. As would be expected, Cosine Error is eliminated when the axis of motion and the measurement axis are perfectly parallel. Cosine error is so named because the resulting error in measurement produced from misalignment is the cosine of the misalignment angle and the hypotenuse of the right triangle formed by the misaligned axis, becoming more severe at long distances. This effect is often very small, even very bad alignments of 2 ° — easily discerned by eye — will result in less than 0.1 percent cumulative inaccuracy (in typical cases).
Cross-Coupling — In multi-axis motion systems (such as X-Y stages or kinematic mirror mounts) cross-coupling describes the relative coupling between motion axes. For example, a commanded motion on the x-axis will also produce motion along the y-axis according to the misalignment between the X and Y axes. This is also observed in an assembly of two rotation stages whose axes are not orthogonal. Also known as Cross-talk.
DC Servomotor — An analog motor designed to be the dynamic element in a servomechanism. Servo motors are used in a broad range of precision motion systems. DC Servo characteristics include: smooth motion performance, broad speed range, and good stability. The controller used to drive DC Servomotors will have an impact on dynamic performance and poor control will result in drift, overshoot, and more generally, high following errors.
There are many adjustable parameters that will impact motion performance of DC Servomotors. These parameters must be optimized to get the best motion performance from the motor. Configuration of these parameters can vary greatly depending on the controller used. User experience will be greatly enhanced by using a controller and stage with automatic configuration capability and an intuitive tool set to perform tuning of parameters. DC Servometers are appropriate for numerous operating conditions from the very small scale micro-motor through large heavy duty applications.
Direct Read Encoders — To understand how a direct read encoder can influence position feedback, it is worthwhile to consider the alternative case of an encoder that is not direct read. For example, rotary shaft encoders are both effective and low-cost devices, but all they really tell us is the angular position of a motor shaft and not the actual location of the load. There are a number of error sources not covered by a rotary shaft encoder: coupling and gearbox errors, cumulative and periodic leadscrew errors, thermal expansion, screw wind-up, or nut backlash. These error sources will cause inaccuracies between the position information derived from a rotary encoder and the real position of the load.
Although it is physically impossible to mount a position feedback device in the same exact place as the user's load, it can be mounted nearby, indicating the actual position more accurately. This is the primary advantage of direct read encoders. A direct read encoder consists of a scale and compact read head. The scale is directly attached to the carriage and the position directly read by the stationary read head. In some systems, the scale is stationary and the read head is moving. For rotary stages, a large diameter rotary disk is attached to the rotating platform. Most direct encoders used with high precision stages are non-contact optical devices. Direct read encoders are available in many different grades. Most common are steel scales with a 20 µm scale pitch. Higher quality scales are available in glass and can feature a 4 µm or even smaller scale pitch. Interpolation circuitry can be mounted within the compact read head, providing differential quadrature signals comparable to most shaft encoders.
Eccentricity (perpendicular to the axis of rotation) — Deviation
of the center of rotation from mean position as a stage rotates through
one revolution. Eccentricity is also referred to as radial runout. A
perfectly centered stage with perfect bearings would have no
eccentricity.
Following Error — Following Error is the instantaneous difference between actual position as reported by the position feedback device and the ideal position, commanded by the controller.
Hysteresis — Hysteresis is a component of the reversal value that is motion observed when the forces acting on a system reverse direction and is the result of elastic forces on the various components of the system. It affects both bi-directional repeatability and accuracy. Hysteresis can also affect precision alignment and tracking applications, the output motion is not linear to the input motion when reversing the direction of motion. Different from backlash, hysteresis is present in all mechanical systems even if its value might be low.
Interferometer — An instrument that utilizes the interference property of light to measure distance. Resolution to a few nanometers is achievable. Besides many applications in position metrology, they have been incorporated into motion devices as higher performance direct-read encoders. However, air is the working fluid for the optical path, rendering even a perfectly vibration-isolated interferometer sensitive to air currents, acoustic noise, changes in barometric pressure, humidity and temperature.
Leadscrew Pitch Error — Some motion systems will incorporate leadscrews to convert rotational motion to linear translational motion.
When using leadscrews to generate precision motion, there are two potential sources of error: sinusoidal errors, which are periodic variations of the leadscrew pitch, and overall errors from the nominal pitch. These errors are a concern for devices that provide metrology via one of several methods: a motor or lead screw mounted encoder, motor mounted encoder, or step per motor pulse counting scheme.
Generally, pitch errors can be compensated for by capable controllers which can be programmed with the measured lead screw pitch. Using linear compensation can not correct for sinusoidal variations. Look-up tables and error models are also used to compensate for leadscrew errors.
Linear Motors — Linear servo motors have become very important components of precision positioning systems, with numerous advantages over traditional mechanical actuators such as ball screws. A linear motor consists of a permanent magnet assembly which establishes a magnetic flux, and a coil assembly which generates a force proportional to coil current. A major design choice relates to the presence or absence of iron in the coil assembly. These motors are specified as ironless or iron core and will have an impact on performance, including: efficiency and cogging.
Linear Runout — The linear portion of error relative to perfect straight-line motion in translation stages. Linear Runout has two orthogonal components, commonly known as Straightness and Flatness. Straightness is a measure of in-plane variations(x-y), and Flatness is a measure of out of plane variation (z).
Minimum Incremental Motion —The smallest motion a device is capable of consistently and reliably delivering. This value should not be confused with Resolution, which is the smallest display increment. Resolution can be
more than an order of magnitude better than MIM. This is a key specification for any positioning product or system, but
is rarely disclosed and often confused with resolution.
MTBF — Mean Time Between Failure, MTBF, is a prediction of the reliability of a product. Tests and statistical analysis of parts and components are performed to predict the rate at which a product will fail. It is one of the most common forms of reliability prediction and is usually based on an established analysis model. Many analytical models exist for MTBF, and choosing one over another must be based on a broad array of factors specific to a product and its application. In general, MTBF is specified with a duty cycle parameter.
PID Control — A common feedback mechanism for control systems. PID is short for Proportional, Integral and Derivative. When operating a closed-loop motion system, errors from ideal are encountered. These errors can be minimized by tuning the PID parameters to optimize performance. PID settings are interdependent and a change in one parameter may require changes to the others. These terms essentially act as weight coefficients on an error correction equation that determines the corrective output of the controller. These terms will vary from stage to stage depending on inherent friction, motion mechanics and payload inertia.
Pitch — Rotation angle about the transverse, or y-axis. This is also known as elevation angle, particularly in gimbal-type mounts used in astronomy and ranging.
Play — Uncontrolled movement due to looseness of mechanical parts. Although very small in a well-built component, it can increase as a component grows older, especially if it is roughly handled or overloaded.
Precision — Range of deviations in output position that will occur for the same error-free input. Precision is also known as repeatability. Although often confused in common parlance, accuracy and precision are not the same. Refer to Figure 3, for a graphical representation of precision relative to accuracy.
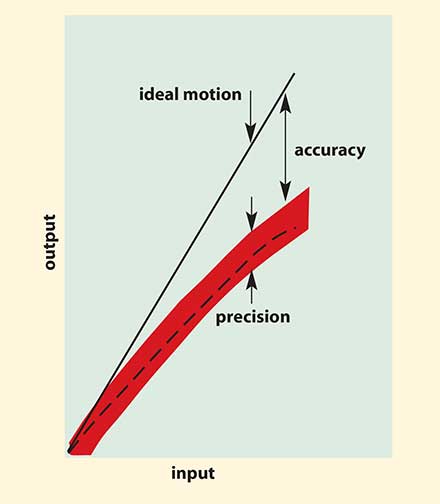
Figure 3a. Illustration of a device with poor accuracy and good precision.
Repeatability — The ability of a motion system to achieve a commanded position over many attempts. Manufacturers often specify unidirectional repeatability, meaning the ability to repeat a motion increment in one direction. This sidesteps issues of backlash and hysteresis and is effective in some applications. A much more significant specification is bidirectional repeatability. Unfortunately, few manufacturers publicize this much tougher measure of motion performance.
Resolution — Resolution, also referred to as display or encoder resolution, is the smallest increment that a motion system can be commanded to move and/or detect. It is not the same as the Minimum Incremental Motion. A system may or may not be able to consistently make incremental moves equal to the resolution. Factors that can affect a move include friction, load, external forces, system dynamics, controller, vibrations, or inertia. (See also the discussion about Minimum Incremental Motion.)
Reversal Value — Reversal Value is the difference between values obtained for a given target position when approached from the two opposite travel directions. A difference in target position values obtained when a positioner is commanded to the same reference point approaching from opposite directions. This value is a combination of backlash and hysteresis. In motion systems built from several interacting components, it is difficult to completely isolate reversal value.
Roll — Rotation about the longitudinal, or x-axis of travel.
Runout —Deviation from perfect straight line travel along the translation axis of a linear stage. Runout consists of deviations in the plane of travel, which is referred to as a Straightness and deviations orthogonal to the plane of travel is referred to as Flatness. These terms apply to single axis motion. For multi-axis systems, errors orthogonal to the axis of motion are referred to as cross-coupling errors.
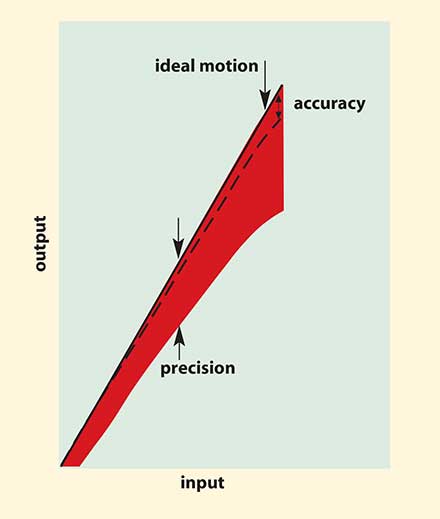
Figure 3b. Illustration of a device with good accuracy and poor precision.
S Curve Profile — A trapezoidal velocity profile is adequate for most applications. The primary disadvantage is that it may cause system disturbances at the “Trapezoid corners” that translate to small vibrations, which extend the settling time. For demanding applications sensitive to this phenomenon, the velocity profile can be modified to have an S shape during the acceleration and deceleration periods. This minimizes the vibrations caused in a mechanical system by inertial effects. An improvement to the S-curve is the S-gamma profile, which has better control of the excitation spectrum resulting from a move, specially in multi-axis systems.
Sensitivity — Ratio of output motion to input drive. Resolution and sensitivity are terms that are sometimes confused. As an example of the difference between the two, for the 80-thread-per-inch adjustment screw, the resolution is better than 10 microns (using our 1° turn definition, see Position Resolution), while the sensitivity is 0.0125 in. or 0.318 mm per turn.
Sinusoidal Errors — Non-cumulative periodic inaccuracies frequently found in leadscrew- or worm-gear-driven devices unless direct output motion metrology is employed.
Static Deflection — Bending of a structural component due to loading. This has little or no effect on most devices’ performance as long as component design limits are not exceeded. For example, placing a 5-kg load on a steel crossed-roller-bearing stage will cause little or no measurable change in performance, since such stages are often rated to more than 70 kg. Similarly, replacing a 100-g micrometer with a 600-g actuator should not seriously affect the performance or longevity of most stages.
Stepper Motor — One of several motor types that increment in discrete steps. Continuous motions are performed by rapid sequences of steps. Small motions can be facilitated by dividing the steps into many discrete parts, a technique called ministepping.
Full-stepping motor controllers are fairly straightforward digital devices — requiring somewhat less of the fuss and bother encountered with certain DC servomotor implementations — and are consequently quite popular among controller designers and users alike. Ministepper controllers are somewhat more complex. Unfortunately, poorly designed stepper devices can run hot and have loud resonances at particular speeds. Advanced electrical drive techniques have mitigated the heat problem, and viscous or ferrofluidic dampers have proved valuable in reducing noise and resonance problems.
Many open-loop stepper-motor systems are marketed as though they were closed-loop — the controller’s count of pulses is taken on faith, though no motion metrology is incorporated. In predictable applications, well-engineered open-loop stepper systems can indeed provide accurate repeatable motion.
Stiction — Occurs because the coefficient of static friction is always greater than the coefficient of moving friction. When a stage is at rest and force is first applied and slowly increased, no motion occurs. At some threshold, motion suddenly begins, so that the first move of the component will be a jump, giving nonlinear and nonrepeatable motion. This effect is what limits the minimum incremental motion.
Trapezoidal Motion Profile — Graphing an advanced motion device’s velocity vs. time or distance results in a trapezoidal plot: First, there is an acceleration phase, terminating at the commanded velocity, then a deceleration phase. Advanced controllers allow user control of acceleration/deceleration — valuable for positioning items such as optical fibers, that are sensitive and susceptible to vibrations from sudden stops and starts. More advanced controllers allow individual setting of acceleration and deceleration. Even more desirable is the ability of a few controllers to specify these parameters separately for long- and short-motion regimes. The latest advance is user-programmable “jerk” — the time rate of change of acceleration. This allows vibration-prone loads to be moved gently but with exceptional efficiency.
Wobble — Tilt, through one revolution, of the axis of rotation relative to the ideal axis. It is most easily observed as a cyclic tilting of the rotating surface or platform of a stage and can produce Abbe error. Like eccentricity, it is generally the result of imperfect bearings.
Yaw — In-plane rotation about the vertical, or z-axis. This is also known as azimuth. This term is also used to refer to the rotation of optics in optical mounts.