First steps are taken to design systems that adapt lighting to conditions.
Detlef Decker, Hella KGaA Hueck & Co.
Despite the fact that the optical performance of novel headlight systems for motor vehicles has increased impressively in recent years, nighttime driving is still loaded with risks. In Europe, for example, 47 percent of all fatalities happen at night, even though only 25 percent of all driving is done then.
For pedestrians, the risk of being killed in an accident at night is even higher. A study conducted at the University of Michigan Transportation Research Institute in 2001 showed that the probability of pedestrian accidents occurring in the dark was a factor of 4.14 higher than it was in daylight.
The goal is to provide sufficient low-beam lighting while avoiding glare for the oncoming traffic. To increase the safety level, the challenge for designers is to adapt optical parameters and characteristics of headlight systems for various traffic and environmental conditions.
Adaptive lighting systems
The first applications of adaptive front lighting systems are just being introduced in the market. With these intelligent systems, curves can be illuminated precisely, and light distribution can be adjusted to the type of road (town, motorway and country). The main functional elements are static bend lighting, dynamic bend lighting and variable adaptive front lighting systems.
Static bend lighting, also called cornering light, is a supporting function that illuminates the side range at intersections or in sharp bends in the road at lower speeds. It is activated by the direction indicator or the steering wheel. Dynamic bend lighting has been supplied in numerous vehicles since 2003 to improve illumination when driving on winding roads. A stepper motor swivels a xenon projector-type headlight module based on algorithms created by calculating curve radius, speed and yaw rates.
An Economic Commission for Europe regulation has defined adaptive low-beam patterns according to the typical glare situation, road size and other physiological framework: town, country, motorway and adverse weather light. In a new design, a projector-type headlight module with a xenon light source is the basis of an optical system faced with the complex task of providing adaptive front lighting while accommodating the demand for flexible light patterns and for a swiveling module.
The light patterns are generated by a small drum in the form of an asymmetric cylinder, rather than a fixed shutter. An additional stepper motor turns the drum. There are approximately six possible positions for the headlight, each of which creates a specific light distribution (Figure 1).
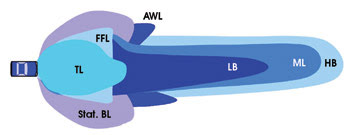
Figure 1. The principle of adaptive front lighting is shown in a bird’s-eye view in front of a car. TL = town light; FFL = front fog light; AWL = adverse weather light; stat. BL = static bending light; LB = low beam; ML = motorway light; HB = high beam.
Additional extensions of the light pattern can be achieved by outward swiveling of the module — that is, in opposite directions — to provide wider horizontal road illumination. This feature is used especially for town light and adverse weather (Figure 2).
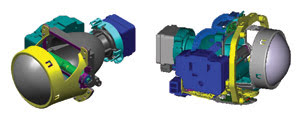
Figure 2. The left image shows a Vario-Xenon projection-type module with asymmetric shutter cylinder (green). On the right, the projection-type module is in a swiveling frame (yellow) with a stepper motor (blue).
To achieve a crucial advance for optimal visibility conditions in darkness, a new kind of system is under development. Besides the adaptive front lighting system distributions, the illumination can be adapted to the particular traffic situation and the road topography.
The system adjusts the extent of the illumination by raising and lowering the cutoff line, which is the horizontal limitation of the illumination of the road in front of the car (Figure 3). It is characterized by a high gradient, meaning that the illuminance on the road in the far distance has to be very high, but above the horizon (where the oncoming traffic has a view of the approaching cars), it must be close to zero. This enables a significantly higher reach of illumination than that of the standard low beam. Thus, the driver obtains the optimum field of view in any situation.
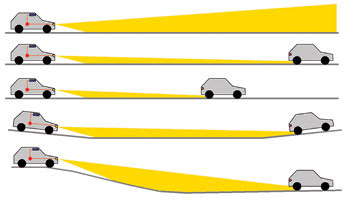
Figure 3. The cutoff line changes depending on traffic and road topography, as shown in five scenarios.
To develop this system, Hella KGaA Hueck & Co. of Lippstadt, Germany, used a Vario-Xenon projection-type module with a modified asymmetric shutter cylinder. A camera-based system with optical data processing is in the design phase. The technical challenge lies in the sensor and electronic control unit, which must analyze the picture and identify all illuminated vehicles on the road. This can be tricky when the scenery includes streetlights, headlights and other illuminated objects. This information, which is generated in real time, is used to steer the vertical position of the cutoff line.
Glare-free high beam
To achieve the maximum illumination, drivers should — in theory — always drive with high beams on. Of course, that is dangerous with current lighting designs because of the glare for oncoming traffic. In the concept of the active cutoff line, the adaptive lights sense approaching traffic and can limit the vertical light distribution. The basic concept of the “active light” with the glare-free high beam will enable drivers to keep the high beam on nearly all the time. That means that additional segments of the light distribution above the horizon will be implemented in the adaptive lighting pattern as well (Figure 4).

Figure 4. The glare-free high beam will adapt to oncoming traffic, allowing drivers to keep high beams on almost continuously.
The technology involved in this approach is a formidable challenge. Because of the dynamics in the traffic area in front of the vehicle with many light sources to be considered simultaneously, electromechanical and mechanical systems are not suitable for this function. The amount of mechanical movable parts and the requested speed and cycles for movement will not fit in most systems. Because LEDs use no mechanical elements and are small and robust, the current technological approach works well with individual LEDs as well as arrays arranged in a pattern.
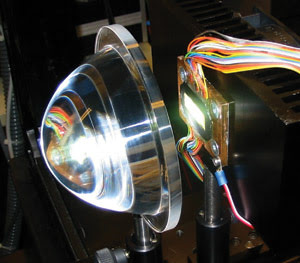
Figure 5. LED arrays work well with new adaptive headlight designs.
To achieve truly adaptive front lighting systems, fail-safe camera-based systems with optical data processing must be developed. Optical designers also must develop accurate, flexible headlight systems that work instantly, realizing high-dynamic and high-contrast ratios at the same time.
There is no doubt that the engineering work will take tremendous effort. But the reward will be unparalleled quality of road illumination for nighttime driving and — what is much more important — a demonstrated reduction of critical accidents at night.
Meet the author
Detlef Decker is director of research and development of the Optics Lighting Div., Hella KGaA Hueck & Co., Lippstadt, Germany; e-mail: [email protected].